
اسلاید های درس سیستم های کنترل چند متغیره دکتر معاونی
به دلایل زیادی تطبیق مولفه های سخت افزاری برای دستیابی به چندین هدف طراحی، یک کار چالش برانگیز است. با توجه به این چالش ها، روش روشنی وجود ندارد که بتواند به طراحان کمک کند تا کنترلرهای سازگاری را برای موارد کلی طراحی کنند. در نتیجه، بیشتر کنترل کننده های سازگار یا از چندین کنترل کننده جدا شده استفاده می کنند که تعامل بین اهداف و پارامترهای سخت افزاری را نادیده می گیرند، یا بر اساس ماهیت خاص سناریوی سازگاری به راه حل های موقت متوسل می شوند. بدیهی است که این رویکرد را نمی توان در مورد کلی نیز تعمیم داد و همچنین اطمینان حاصل کرد که کنترل کننده های مختلف با یکدیگر به خوبی کار می کنند.
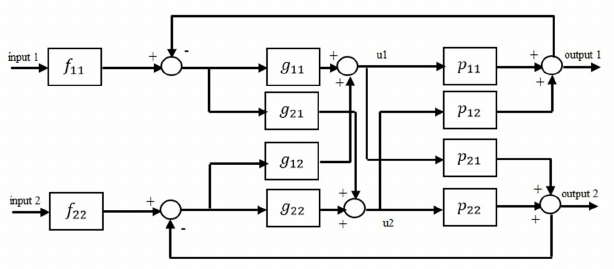
یک روش جایگزین استفاده از نظریه کنترل است که شهود طراح را با روش های دقیق برای تولید کنترل کننده های سازگار قابل اطمینان و بهینه ترکیب می کند. به طور خاص، ما به آنچه به عنوان کنترل چند ورودی چند خروجی (MIMO) گفته می شود نیاز داریم. در این روش، طراح اطلاعاتی را که در مورد طرح دارد مانند اولویت های خروجی یا هزینه های اضافی ورودی ها را مشخص می کند. الگوریتم های اساسی یک کنترلر با تحریک همزمان چندین ورودی چندین هدف را برآورده می کند. فعل و انفعالات بین ورودی و خروجی به صورت ساختاری نشان داده می شود و کنترل کننده نهایی با آگاهی از همه این تعاملات قادر به تصمیم گیری بهتر است…
سرفصل مطالب:
- مقدمه
- نمایش سیستم هاي چند متغیره
- قطب ها و صفرهاي سیستم هاي چند متغیره
- تحلیل و طراحی سیستم های کنترل چند متغیره در حوزه فضای حالت
- پایداري و محدودیت هاي عملکردي در سیستم هاي چند متغیره
- تحليل پايداري و عملکردي سيستم هاي چند متغيره نامعين
- مباحث کلاسیک در طراحی سیستم هاي کنترل چند متغیره
لینک دانلود: اسلاید های درس سیستم های کنترل چند متغیره دکتر معاونی
تعداد صفحات: 223 صفحه
حجم: 17.1 مگابایت
استاد: دکتر بیژن معاونی (دانشگاه علم و صنعت)
زبان: انگلیسی