
اسلاید های کنترل تطبیقی بخش MRAS (سیستم های تطبیقی مدل مرجع)
یک راهبرد کنترلی باید بتواند علاوه بر پایداری، در یک بازه زمانی از پیش تعیین شده به معیارهای مطلوب نظیر سرعت مورد نظر، مصرف سوخت بهینه و یا کاهش آلایندگی دست یابد. الگوریتم های مبتنی بر مدل به علت بهینه سازی بر مبنای اجزای سیستم محرکه ی خودرو و سیکل رانندگی نسبت به روش های مبتنی بر قواعد، عملکرد بهتری دارند. اما این روش ها نسبت به تغییرات پارامترهای خودرو و رفتارهای رانندگان حین رانندگی، حساس می باشند. یک خودرو با داشتن زیر سیستم های متعدد از جمله سیستم های پیچیده محسوب می شود. کنترل کننده تطبیقی، کنترل کننده ای است که عملکرد خود را در پاسخ به تغییرات دینامیک فرآیند و اثر اغتشاشات اصلاح می کند.
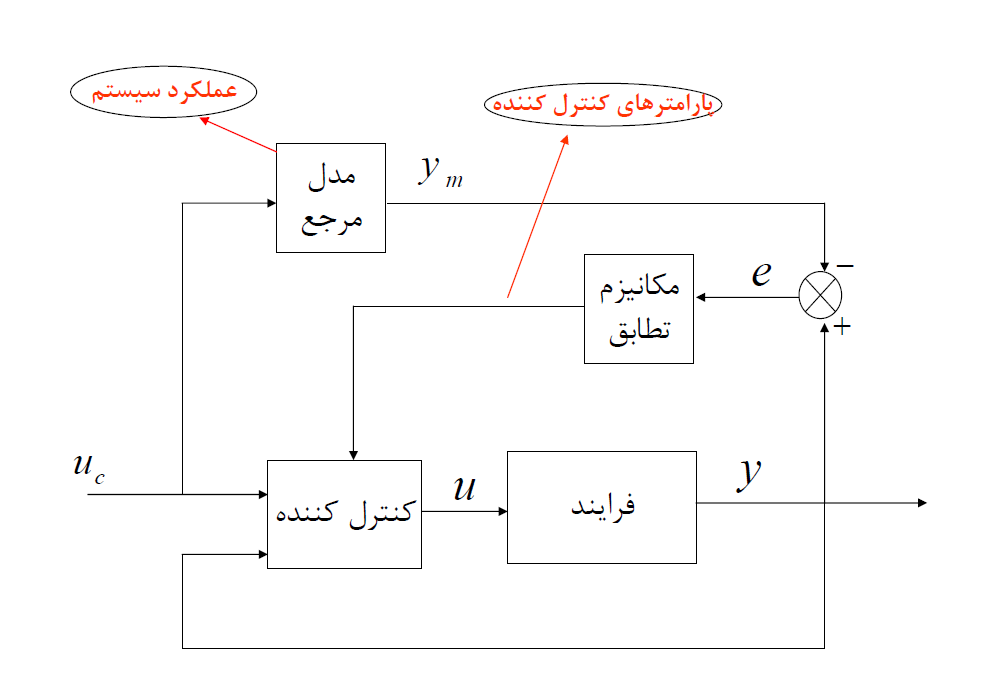
اساس کار کنترل تطبیقی تخمین پارامترهای نامشخص و یا متغیر سیستم در حین کارکرد می باشد. یک سیستم کنترل تطبیقی می تواند به صورت دو حلقه تعریف شود. یک حلقه کنترل فیدبک معمولی با فرآیند و کنترل کننده، حلقه دیگر جهت تطبیق پارامترهای سیستم می باشد. کنترل کننده های تطبیقی به چهار دسته تقسیم می شوند: جدول بندی بهره، کنترل تطبیقی مدل مرجع، سیستم های تطبیقی خود تنظیم، کنترل دوگانه. سیستم کنترل مدل مرجع برای حل مسائلی است که در آن مشخصه های عملکرد بر حسب یک مدل مرجع داده شده است. تعیین مکانیسم تنظیم به طوری است که خطای یک سیستم پایدار را صفر کند و در آن فرض می شود پلنت دارای ساختمانی معلوم و پارامترها نامعلوم می باشد…
لینک دانلود: اسلاید های کنترل تطبیقی بخش MRAS (سیستم های تطبیقی مدل مرجع)
تعداد صفحات: 53 صفحه
حجم: 1.15 مگابایت
استاد: دکتر علی خاکی صدیق
زبان: فارسی