
تنظیم کنترلر PID براساس منطق فازی
یکی از مهم ترین و پرکاربردترین انواع کنترل کننده های مورد استفاده در صنعت، کنترل کننده های PID (تناسبی-انتگرال گیر-مشتق گیر و یا Proportional-Integral-Derivative) هستند. چرا که این خانواده از کنترل کننده ها، در کنار سادگی ساختاری و امکان پیاده سازی نسبتا آسان، دارای عملکرد مناسبی برای حوزه وسیعی از سیستم های تحت کنترل هستند، و از کیفیت و مقاومت بالایی برخوردارند. طراحی و به کار گیری کنترل کننده PID، نیازمند تنظیم و تصمیم گیری در خصوص مقادیر سه پارامتر است، که اصطلاحا به عنوان ضرایب یا بهره های کنترل کننده PID شناخته می شوند. اما تنظیم این ضرایب کار آسانی نیست و قواعد و رویکردهای فراوانی برای این موضوع، پیشنهاد شده است.
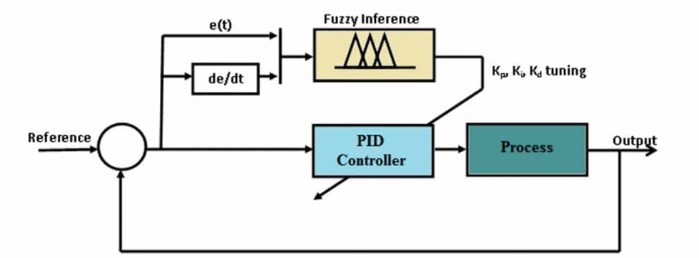
در کنترلر فازی-PID، وظیفه تعیین گین های تناسبی، انتگرال گیر و مشتق گیر بر عهده یک سیستم استنتاج فازی است که با دریافت سیگنال خطا و مشتق آن، ضرایب کنترلر PID را به صورت آنلاین محاسبه و تنظیم می نماید. مزایای استفاده از منطق فازی در تنظیم بهره های کنترلر PID:
- قابل اجرا برای سیستم های دارای دینامیک غیرخطی مانند اشباع
- تعادل بین زمان صعود (rise time) و فراجهش (overshoot) در پاسخ (فراجهش کمتر و زمان صعود کوچکتر به طور همزمان، که با استفاده از روش های مرسوم غیرممکن است)
- نقش کلیدی سهولت تنظیم پارامترهای سیستم فازی در کاربردهای عملی
- و….
در این نوشته سعی کردیم تا مختصرا برای شما عزیزان به معرفی نحوه “تنظیم کنترلر PID براساس منطق فازی” بپردازیم.
