
مقدمه ای بر کنترل مد لغزشی و کاربرد های آن
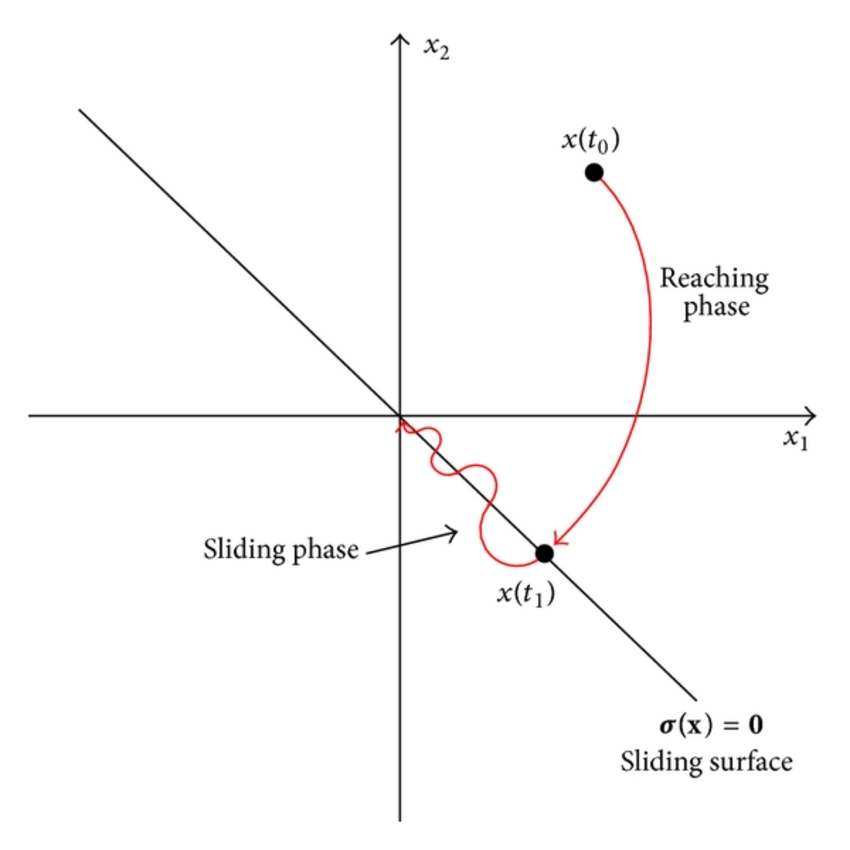
کنترل مد لغزشی (SMC) یک تکنیک کنترل غیرخطی است که دارای ویژگی های قابل توجه ای از جمله دقت، استحکام، تنظیم آسان و پیاده سازی است. پس از رسیدن به سطح لغزش، کنترل مد لغزشی حالت ها را در نزدیکی سطح لغزش نگه می دارد. از این رو کنترل مد لغزشی یک کنترل کننده دو بخشی است. بخش اول شامل طراحی یک سطح لغزش است به طوری که حرکت لغزشی مشخصات طراحی را برآورده کند. بخش دوم مربوط به انتخاب یک قانون کنترل است که باید سطح سوئیچینگ برای حالت های سیستم جذب کننده باشد.
تاکنون، کنترل مد لغزشی روی سیستم های مختلفی پیاده سازی شده است. یکی از این کاربرد ها در مدارهای الکترونیک قدرت و درایوهای الکتریکی است. در این موارد، کنترل مد لغزشی استاندارد با استقبال بسیاری مواجه شده است که از دلایل آن می توان به ماهیت سوئیچینگ سیگنال کنترل در این سیستم ها اشاره کرد که با این نوع کنترل کننده سازگار است. کنترل مد لغزشی مرتبه دوم نیز در موتورهای الکتریکی DC مورد استفاده قرار گرفته است. کنترل سیستم های قدرت نیز یکی از زمینه های پرکاربرد SMC بوده است. کنترل مد لغزشی مرتبه دوم نیز تاکنون در بسیاری سیستمهای مکانیکی از قبیل جرثقیل ها، بازوهای رباتیک و قطارهای مسافربری به کار رفته است…
لینک دانلود: مقدمه ای بر کنترل مد لغزشی و کاربرد های آن
تعداد صفحات: 23 صفحه
حجم: 1.09 مگابایت
زبان: انگلیسی