
کد های متلب کاهش مرتبه مدل سیستم های خطی
کاهش مرتبه مدل های دینامیکی، که غالبا از طریق عملیات شناسایی سیستم به دست آمده اند، یک فاز بسیار مهم در طراحی کنترل کننده و تحلیل عملکرد سیستم های کنترلی محسوب می شود. از این رو، روش های متعددی برای حوزه های کنترل خطی و غیر خطی پیشنهاد شده اند که هر کدام استفاده های متنوعی دارند. رای سیستم های خطی، چند روش سیستماتیک وجود دارند که به عنوان نمونه می توان موارد زیر را نام برد.
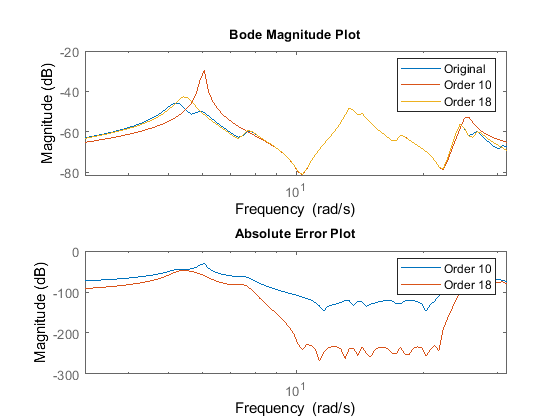
کاهش مرتبه سیستم را می توان هم برای تابع تبدیل و هم برای معادلات حالت اعمال نمود. معمولا هدف از کاهش مرتبه سیستم رسیدن به معادلات با درجه کمتر و در پی آن طراحی راحت تر کنترل کننده است. برای کاهش مرتبه تابع تبدیل کافیست قطب های پایداری که نسبت به قطب های دیگر 5 تا 10 برابر دورتر اند را حذف کنیم. همچنین می توانیم صفر و قطب های نزدیک به هم را ساده کنیم تا به معادلات با درجه کمتر برسیم. برای معادلات حالت نیز می توانیم مد هایی که کنترل پذیر و رویت پذیر نیستند را حذف کنیم تا به سیستمی با درجه کمتر دست یابیم…
لینک دانلود: کد های متلب کاهش مرتبه مدل سیستم های خطی
حجم: 9.58 مگابایت
نرم افزار: متلب