
کنترل مد لغزشی پاندول معکوس دوبل
تقریبا تمامی سیستم ها در طبیعت داراي دینامیک غیرخطی هستند و در بیشتر موارد نمی توان از تقریب خطی آن ها بدلیل ایجاد نامعینی زیاد در سیستم تقریب زده شده براي کنترل استفاده نمود. لذا روش هاي موجود در زمینه کنترل سیستم هاي خطی براي تمامی سیستم ها کافی نبوده و نیاز به روش هایی براي کنترل سیستم هاي غیرخطی می باشد. با توجه به اهمیت کنترل سیستم هاي غیرخطی، رویکردهاي زیادي در این زمینه و براي کلاس هاي مختلف سیستم هاي مذکور در مقالات و کتب مختلف ارایه شده است که هر یک براي سیستم ها با دینامیک خاصی مناسب است.
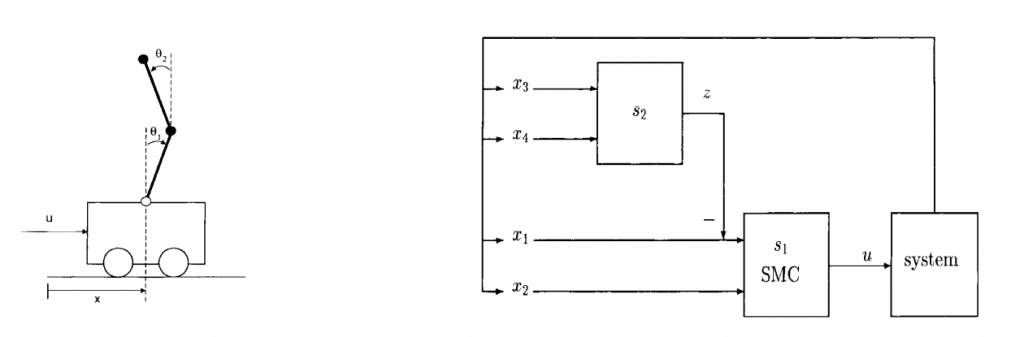
در این میان براي کنترل یک آونگ معکوس دوبل بخاطر وجود عدم قطعیت هاي پارامتر از روش کنترل لغزشی که کاربرد بیشتري در اینگونه شرایط داشته بهره می بریم. در این مقاله ابتدا به بررسی چگونگی رفتار کنترل لغزشی پرداخته و نحوه تشکیل معادلات دینامیکی و به تبع آن استنتاج مدل کنترلی توضیح داده می شود. پس از آن یک آونگ معکوس دوبل سوار شده بر روي ارابه مدل شده و منطق لغزشی براي آن نتیجه گیري می شود و پس از آن توسط سیمولینک متلب، مدل مورد نظر شبیه سازي شده و نتایج آن در انتها مورد بررسی قرار می گیرد….
لینک دانلود: مقاله کنترل مد لغزشی پاندول معکوس دوبل
تعداد صفحات: 8 صفحه
حجم: 474 کیلوبایت
زبان: فارسی