
جزوه کامل درس کنترل تطبیقی دکتر سجادیان
کنترل تطبیقی روشی است که در کنترل کننده بکار گرفته می شود تا بتواند خود را با سیستم اصلی (پلنت) تطبیق دهد. این فرآیند در سیستم هایی که با پارامترهای متغیر کار می کند یا دارای مقادیر اولیه نامعین می باشد، بکار گرفته می شود. به عنوان مثال می توان به سیستمی نظیر کووادروتور اشاره کرد، این سیستم بواسطه چرخش هایی که در حین حرکت انجام می دهد، مقادیر نامعینی برای ممان اینرسی های خود خواهد داشت. مثالی دیگر سیستم هایی هستند که با تغییر جرم در سیستم خود مواجه هستند ، فضاپیماها که بخش اعظم جرم اولیه آن ها وابسته به سوخت می باشد و با شروع حرکت تا انتهای مسیر این سوخت را از دست می دهند.
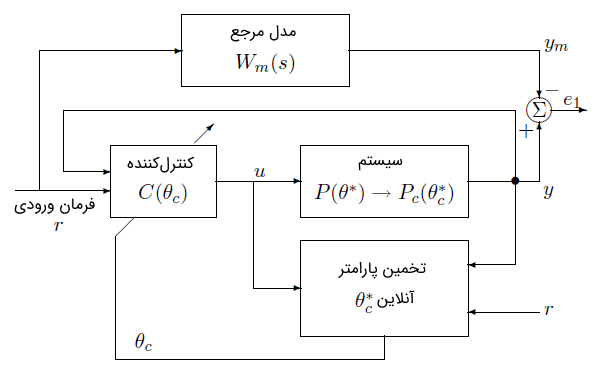
اساس کنترل تطبیقی بر تخمین پارامتر استوار است. از ابتدای علم کنترل روش هایی به منظور تخمین پارامتر در حلقه های کنترلی معرفی شده اند. روش بازگشتی حداقل مربعات و گرادیان کاهشی از جمله این روش ها می باشند. هر دو روش مورد نظر قوانین تخمین برای بدست آوردن پارامترهای سیستم ارائه می دهند که می توانند به صورت آنلاین بکار برده شوند. اگرچه این روش ها اصل سرعت تخمین در نظر گرفته می شود که به دلیل وجود حلقه های تکرار سرعت فرآیند کنترل را کاهش می دهند. مسئله سرعت در کنترل اهمیت بالایی دارد و تاخیر می تواند (به جهت ایجاد فاز منفی) باعث ناپایداری و یا حداقل کاهش مشخصه های کیفی(خطای حالت ماندگار – نوسان حالت ماندگار) سیستم گردد…
لینک دانلود: جزوه کامل درس کنترل تطبیقی دکتر سجادیان
تعداد صفحات: 106 صفحه
حجم: 4.30 مگابایت
استاد: دکتر هومن سجادیان (دانشگاه علم و صنعت)
زبان: فارسی