
مقاله طراحی با استفاده از لیاپانوف
این مقاله با تقسیم سیستم ها به چندین کلاس مجزا، به بررسی اجمالی برخی از رویکرد های پیشرفته در طراحی لیاپانوف می پردازد، اگرچه به طور کلی هیچ روش منظمی در انتخاب تابع کاندید لیاپانوف مناسب برای طراحی کنترل کننده وجود ندارد تا پایداری حلقه بسته را تضمین کند. طراحی لیاپانوف از زمان معرفی آن در سال 1982 ابزاری اصلی برای طراحی سیستم کنترل غیرخطی، پایداری و تجزیه و تحلیل عملکرد بوده است. ایده اصلی این است که یک قانون کنترل فیدبک طراحی کنیم که مشتق یک کاندید مشخص از توابع لیاپانوف را منفی یا نیمه منفی کند. روش مستقیم لیاپونوف یک تفسیر ریاضی از ویژگی فیزیکی است که اگر کل انرژی سیستم در حال اتلاف است، در این صورت حالت های سیستم در نهایت به یک نقطه تعادل می رسند.
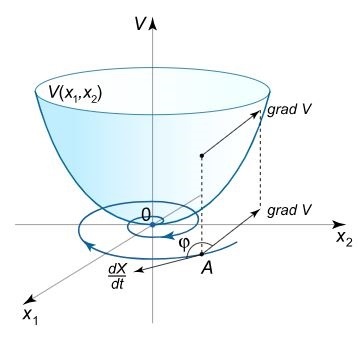
ایده اصلی این روش این است که اگر نوعی تابع پیوسته انرژی وجود داشته باشد به گونه ای که این انرژی در امتداد مسیر سیستم کاهش یابد، گفته می شود که این سیستم به صورت مجانبی پایدار است. از آنجا که برای تعیین پایداری سیستم نیازی به حل معادلات مختلف حاکم بر سیستم نیست، معمولاً از آن به عنوان روش مستقیم یاد می شود. اگرچه روش مستقیم لیاپانوف برای تجزیه و تحلیل پایداری کافی است، اما به دلیل دشواری در انتخاب یک تابع لیاپانوف، از قابلیت محدود برخوردار است…
لینک دانلود: مقاله انگلیسی طراحی با استفاده از لیاپانوف
تعداد صفحات: 34 صفحه
حجم: 534 کیلوبایت
زبان: فارسی