
طراحی کنترل مد لغزشی سیستم تعلیق مغناطیسی
در يک سيستم مغناطيسي شناور، هدف بايد در فضا بدون هيچگونه تماسي معلق بماند. سيستم تعليق مغناطيسي بطور گسترده اي در زمينه ها و کاربرد هاي مختلفي از جمله در ژيروسکوپ، شتاب سنج ، قطارهاي سريع و… بکار مي رود. کنترل لغزشي در سيستم هايي که در آن ها عدم قطعيت وجود دارد به کار مي رود. اين عدم قطعيت مدل ممکن است ساختاري (عدم قطعيت پارامترها) و يا غير ساختاري (مثلاً ديناميک هاي مدل نشده) باشد. کنترل مد لغزشي يک روش کنترل غير خطي است که استراتژي کنترل را در برابر عدم قطعيت ها تضمين مي کند. در اين روش پايداري بوسيله نگه داشتن حالت هاي سيستم روي سطح لغزش بدست مي آيد.
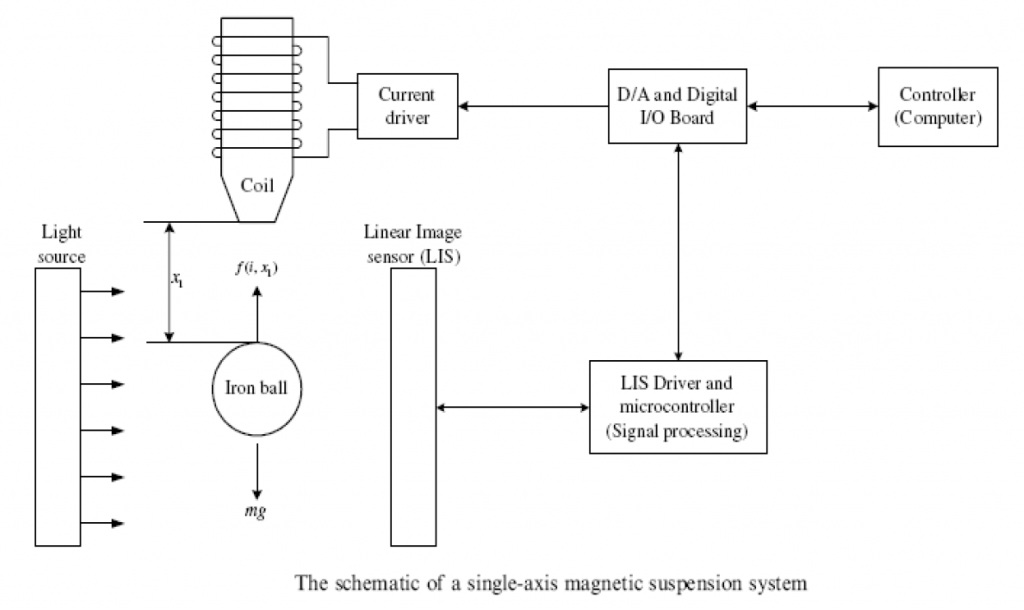
ايده اصلي اين روش جايگزين کردن يک سيستم درجه ۱ غير خطي با عدم قطعيت، به جاي يک سيستم درجه n مي باشد. به سادگي مي توان نشان داد عملکرد دقيق با وجود پارامترهاي غير دقيق بدست مي آيد. هر چند ممکن است به بهاي سيگنال کنترلي بسيار بزرگي باشد که ايجاد آن در عمل ممکن نباشد. هدف از اين پروژه، اعمال کنترل کننده لغزشي براي دنبال کردن موقعيت گوي مغناطيسي در مسير دلخواه و بررسي نتايج آن مي باشد. همچنين در اين پروژه جرم گوي به عنوان عدم قطعيت پارامترها در نظر گرفته شده است…
لینک دانلود: طراحی کنترل مد لغزشی سیستم تعلیق مغناطیسی
تعداد صفحات: 22 صفحه
حجم: 516 کیلوبایت
زبان: فارسی