
اسلاید های کنترل پیش بین دانشگاه فردوسی مشهد
کنترل پیش بین (مبتنی بر مدل) که به اختصار MPC خوانده می شود؛ در اواخر دهه هفتاد ایجاد شد و از آن زمان تا کنون به شکل چشم گیري گسترش یافته است. اصطلاح کنترل پیش بین به معناي کاربرد یک روش کنترلی واحد نیست؛ بلکه این روند متشکل از دامنه وسیعی از روش هاي کنترلی است که به منظور دست یابی به سیگنال کنترل و با به حداقل رساندن تابع هدف، به شکلی صریح از مدل فرآیند استفاده می کند. کاربرد این روش هاي طراحی منجر به دستیابی به کنترل کننده هاي خطی می شود که از لحاظ عملی ساختاري مشابه داشته و میزان آزادي 1 ارائه شده توسط آن ها در حد مطلوب است.
همه ایده هایی که چه در مقیاس بزرگتر و چه در مقیاس کوچکتر در خانواده روش هاي کنترل پیش بین بوجود می آیند داراي خواص اولیه زیر هستند:
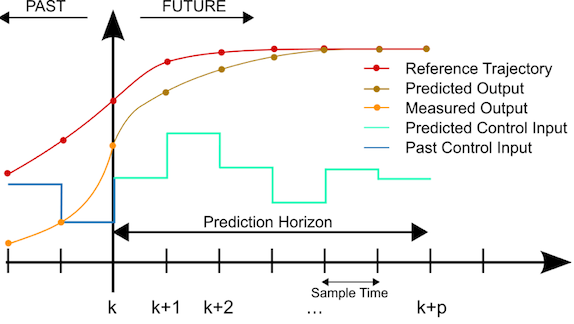
- بهره گیري از یک مدل به منظور پیش بینی خروجی فرآیند در بازه هاي زمانی آتی (افق)
- محاسبه یک توالی کنترلی که تابع هدف را به حداقل میرساند
- به کار بردن استراتژي خزشی بدین منظور که در هر لحظه، افق فرآیند در راستاي آینده جابه جا شود، البته براي این مهم به کارگیري اولین سیگنال کنترلی توالی که در هر قدم محاسبه می شود ضروري است…
لینک دانلود: اسلاید های کنترل پیش بین دانشگاه فردوسی مشهد
تعداد صفحات: 543 صفحه
حجم: 8.16 مگابایت
استاد: دکتر حسینی ثانی
زبان: فارسی