
جزوه اصول نظریه لیاپانوف
الکساندر میخائیلویچ لیاپونوف ریاضی دان و فیزیک دان روسی که به دلیل توسعه نظریه پایداری سیستم های دینامیکی و نیز سهم عمده اش در نظریه احتمالات و فیزیک ریاضی شهرت دارد. عمومی ترین و مفید ترین روش برای مطالعه پایداری سیستم های کنترل غیر خطی تئوری ایست که در اواخر قرن 19 میلادی (سال 1892) توسط لیاپانوف در مطالعه ای تحت عنوان “General Problem of Motion Stability” ارائه شد.
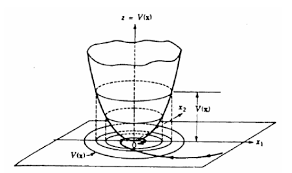
یک سیستم دینامیکی پایدار لیاپانوف است اگر تمامیِ پاسخ های آن با قرار دادن حالت اوّلیه در نزدیکی نقطه تعادل، برای همیشه حول نقطه تعادل باقی بماند. در غیر اینصورت سیستم دینامیکی، ناپایدار میباشد. سیستم پایدار مجانبی است در صورتی که تمامیِ پاسخ هایی که در نزدیکیِ نقطه تعادل آغاز می شوند نه تنها در نزدیکی آن باقی بمانند، بلکه با میل کردن زمان به بینهایت، به سمت نقطه تعادل همگرا گردند. پایداریِ مجانبی شکل قویتری از پایدای میباشد. قضایای مربوط به پایداری لیاپانوف، شروطی کافی برای پایداریِ سیستم دینامیکی ارائه می کند حال آنکه این قضایا بیان کننده این نکته نیستند که آیا این شروطِ پایداری، لازم نیز هستند یا خیر…
مباحث بیان شده:
- سیستم های غیر خطی و نقاط تعادل
- مفاهیم پایداری
- خطی سازی و پایداری محلی
- روش مستقیم لیاپانوف
- آنالیز سیستم بر اساس روش مستقیم لیاپانوف
- طراحی کنترل کننده بر اساس روش مستقیم لیاپانوف
لینک دانلود: جزوه آموزش اصول نظریه لیاپانوف
تعداد صفحات: 52 صفحه
حجم: 1 مگابایت
زبان: فارسی