
کد های متلب جهت تنظیم ضرایب PID به روش زیگلر-نیکولز
امروزه، تعداد کنترل کننده های زیاد و متنوعی در صنعت و در بسیاری از زمینه ها استفاده می شود. به طور كلی می توان كنترل ها را به دو گروه اصلی تقسیم كرد:
- کنترل کننده های معمولی
- کنترل کننده های غیر معمول
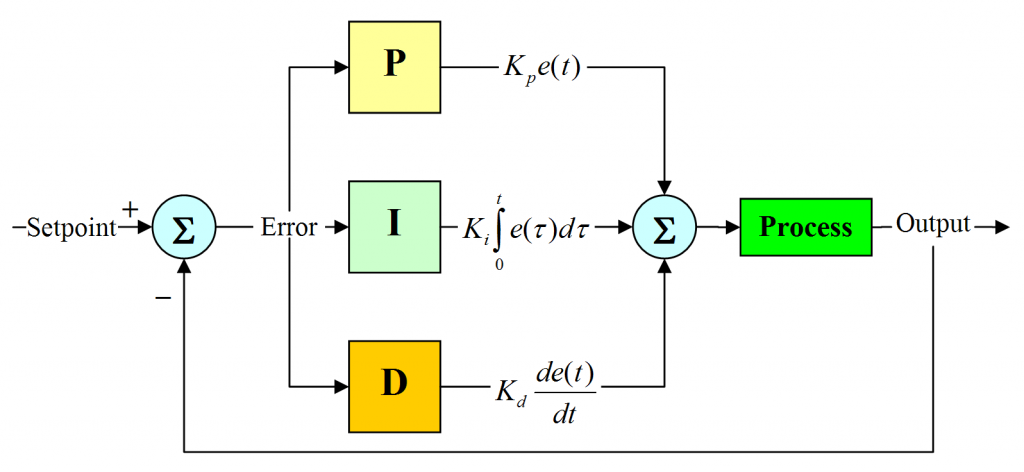
کنترل کننده های معمولی کنترلرهایی که سال هاست شناخته شده اند، مانند ON-OFF ،P ،PI ،PD ،PID. شخص باید یک مدل ریاضی از فرآیند را بداند تا بتواند یک کنترلر طراحی کند و این ویژگی همه کنترل کننده های متداول است. کنترل کننده PID یک کنترل کننده سه قسمتی ای است که از ابتدای قرن گذشته در زمینه کنترل خودکار رواج داشته است. به دلیل شهودی بودن و سادگی نسبی آن، علاوه بر عملکرد رضایت بخشی که قادر است با طیف گسترده ای از فرآیندها ارائه شود، در عمل آن را به کنترل کننده استاندارد در تنظیمات صنعتی تبدیل کرده است.کنترل کننده های غیر متعارف از رویکردهای جدیدی برای طراحی کنترل کننده استفاده می کنند که در آن دانش مدل مدل ریاضی به طور کلی مورد نیاز نیست. نمونه هایی از کنترل کننده های غیر متعارف یک کنترل کننده فازی و کنترل کننده های عصبی یا عصبی-فازی هستند…
لینک دانلود: کد های متلب جهت تنظیم ضرایب PID به روش زیگلر-نیکولز
حجم: 1 مگابایت
نرم افزار: متلب