
جزوه خلاصه آموزش PID
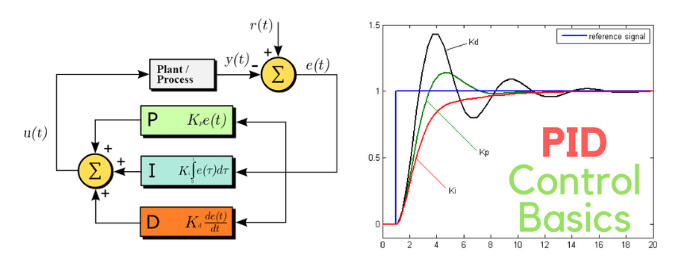
کنترل PID یک روش کنترل حلقه بسته است که سه سبک کنترلی تناسب، انتگرال و مشتق را با یکدیگر ترکیب می کند. کنترل تناسبی باعث ایجاد یک کنترل صاف و بدون تغییرات شدید می گردد. کنترل انتگرالی به طور خودکار خطای سیستم را اصلاح می کند. کنترل مشتق به سرعت به اختلالات پاسخ می دهد. کنترلر PID مورد استفاده ترین نوع کنترل در پروسه های مختلف به حساب می آید. زمانی که از این نوع کنترلر در سیستم استفاده می شود ترکیب کنترل های تناسبی، انتگرالی و مشتق باعث تکمیل شدن یکدیگر شده و در نهایت منجر به کاهش خطاهای سیستم و رسیدن آن ها به صفر در زمان کوتاهی در مقایسه با سایر تکنیک های کنترلی می شود.
اولین کنترلر PID در سال 1911 توسط Elmer Sperry ساخته شد. پس از آن، TIC (شرکت ابزاری تیلور) یک کنترلر پنوماتیک با قابلیت تنظیم کامل در سال 1933 ارائه کرد. با گذشت چند سال، مهندسان کنترل توانستند خطای حالت ماندگار را که در کنترلکنندههای تناسبی یافت میشد، حذف کنند. پس از آن، در سال 1940، اولین کنترل کننده PID پنوماتیک از طریق یک عمل مشتق برای کاهش مشکلات overshooting توسعه یافت. در سال 1942، Ziegler & Nichols قوانین تنظیم را برای یافتن و تنظیم پارامترهای مناسب کنترلرهای PID معرفی کردند. سرانجام، کنترل کننده های خودکار PID در اواسط سال 1950 به طور گسترده در صنایع مورد استفاده قرار گرفتند…
لینک دانلود: جزوه خلاصه آموزش PID
تعداد صفحات: 5 صفحه
حجم: 1.69 مگابایت
زبان: فارسی
