⌛مدت زمان مطالعه: 10 دقیقه!
🧠 مقدمه ای بر Computational Neuroscience
آیا تا به حال به این فکر کردهاید که مغز انسان، این پیچیدهترین سیستم شناختهشده در جهان، چگونه اطلاعات را پردازش میکند؟ علوم اعصاب محاسباتی (Computational Neuroscience) پاسخی سیستماتیک به این پرسش بنیادین است. این رشته، به عنوان یک حوزهٔ میانرشتهای پویا، در تلاش است تا با بهرهگیری از مدلهای ریاضی، شبیهسازیهای کامپیوتری و مبانی نظری علوم اعصاب تجربی، به درکی عمیقتر از عملکرد مغز و سیستم عصبی دست یابد.
🎯 تعریف و هدف
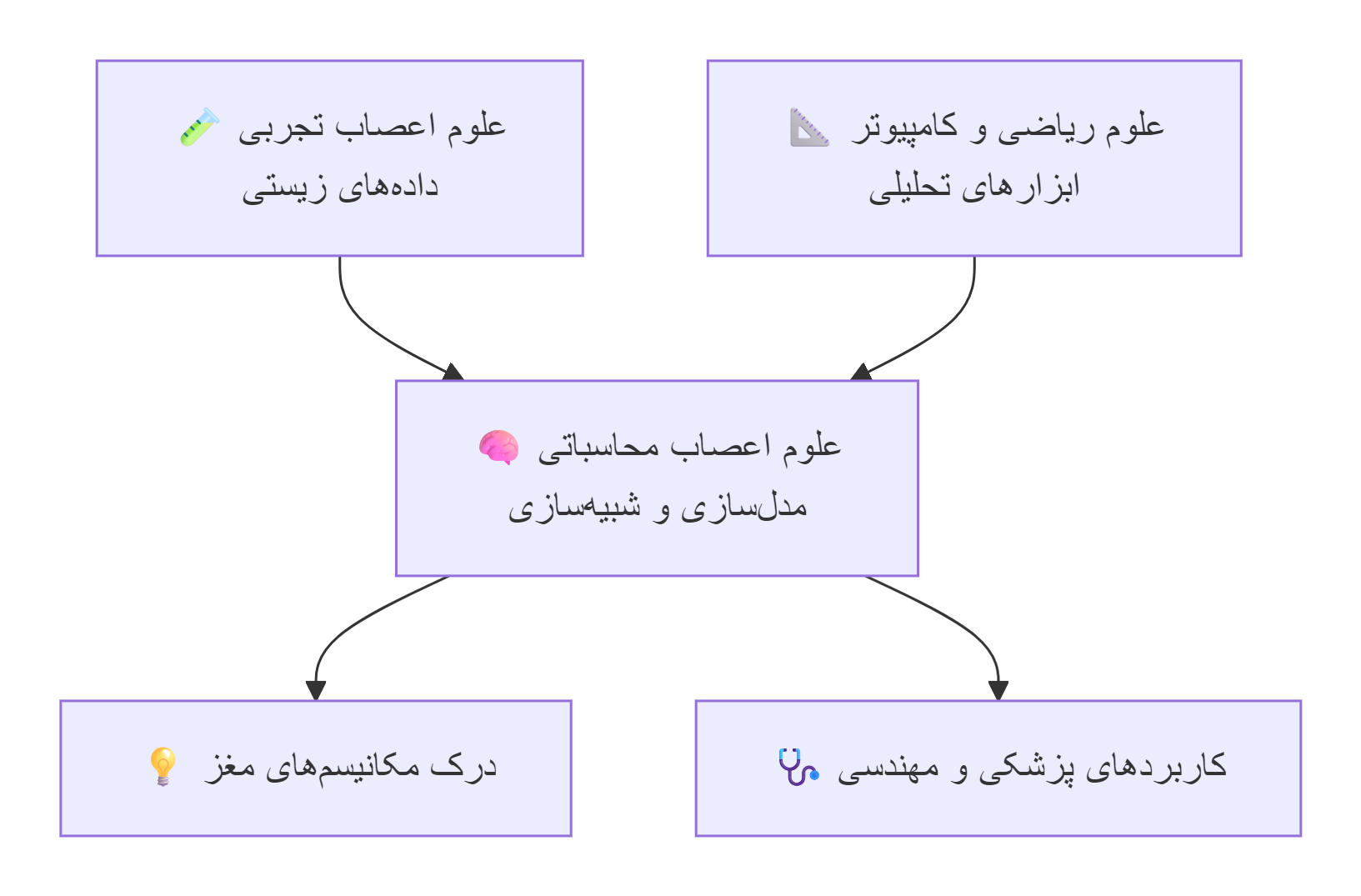
به زبان ساده، علوم اعصاب محاسباتی پلی است میان علوم زیستی (نوروساینس) و علوم دقیق (ریاضی، فیزیک، علوم کامپیوتر و مهندسی). هدف آن، فراتر از ثبت و مشاهدهٔ فعالیت مغز، شبیهسازی و مدلسازی فرآیندهای عصبی برای کشف قوانین حاکم بر آنهاست. به عنوان مثال، محققان با ساخت مدلهای کامپیوتری از شبکههای عصبی، میتوانند نحوهٔ شکلگیری حافظه، تصمیمگیری و یا بروز بیماریهای عصبی را بررسی کنند.
📜 تاریخچه: از مدلهای نورون تا سایبرنتیک
-
🔬 نقطهٔ عطف اول: مدل هاچکین-هاکسلی (۱۹۵۲): بنیان علوم اعصاب محاسباتی مدرن، با مدل ریاضی هاچکین-هاکسلی (Hodgkin-Huxley) برای توصیف پتانسیل عمل در نورونها شکل گرفت. این مدل که بعدها جایزه نوبل را برای سازندگانش به ارمغان آورد، نشان داد که میتوان فرآیندهای پیچیدهٔ زیستی را با معادلات ریاضی دقیق توصیف کرد.
-
🧠 تولد یک رشته (۱۹۸۵): اصطلاح «علوم اعصاب محاسباتی» برای اولین بار توسط پروفسور اریک شوارتز از دانشگاه بوستون در یک کنفرانس بینرشتهای در سال ۱۹۸۵ معرفی شد و سرانجام در سال ۱۹۹۰ با انتشار مجموعه مقالات آن کنفرانس، به عنوان یک رشتهٔ علمی رسمیت یافت.
-
🔄 ارتباط با سایبرنتیک و نظریه کنترل: ریشههای فکری این رشته به دههها قبل و شکلگیری علم سایبرنتیک بازمیگردد. نوربرت وینر (Norbert Wiener) در کتاب انقلابی خود با عنوان «سایبرنتیک؛ یا کنترل و ارتباط در حیوان و ماشین» (۱۹۴۸)، برای اولین بار شباهت ساختاری میان سیستمهای کنترلی در ماشینها و موجودات زنده را مطرح کرد. این دیدگاه، پایهای برای استفاده از مفاهیم مهندسی کنترل در تحلیل مغز شد. امروزه، حوزهٔ جدیدی به نام علوم اعصاب سایبرنتیکی (Cybernetical Neuroscience) در حال شکلگیری است که به طور خاص به مطالعهٔ مدلهای ریاضی در علوم اعصاب با روشهای سایبرنتیک (علم کنترل و ارتباطات) میپردازد.
🎛️ ارتباط با مهندسی کنترل: چرا برای ما مهم است؟
ارتباط علوم اعصاب محاسباتی و مهندسی کنترل، عمیق و دوسویه است. مفاهیمی که در قلب مهندسی کنترل قرار دارند، برای درک عملکرد مغز حیاتی هستند:
🌐 شبکههای عصبی به عنوان سیستمهای دینامیک
مغز را میتوان یک سیستم دینامیکی غیرخطی بسیار پیچیده با بازخوردهای گسترده در نظر گرفت. مهندسان کنترل با مفاهیمی چون فضای حالت (State-Space) ، پایداری و بازخورد به خوبی آشنا هستند و این دقیقاً همان زبانی است که برای تحلیل شبکههای عصبی به کار میرود.
🕹️ کنترلپذیری و رویتپذیری مغز
دو مفهوم بنیادین در تئوری کنترل، یعنی کنترلپذیری (Controllability) و رویتپذیری (Observability) ، کاربرد مستقیمی در علوم اعصاب دارند:

🤖 کنترل حلقهبسته و واسطهای مغز و رایانه (BCI)
یکی از هیجانانگیزترین کاربردهای این هم افزایی، در واسطهای مغز و رایانه (Brain-Computer Interfaces) است. در یک سیستم BCI، سیگنالهای مغزی خوانده شده و پس از پردازش، برای کنترل یک دستگاه خارجی (مانند بازوی رباتیک یا نشانگر ماوس) استفاده میشود. این یک سیستم کنترل حلقهبسته کلاسیک است که در آن مغز به عنوان سیستم، سیگنالهای مغزی به عنوان خروجی، و محرک های بازخوردی به عنوان ورودی عمل میکنند.
💡 کاربردهای کلیدی
1. 🩺 پزشکی و درمان بیماریهای عصبی
مدلهای محاسباتی به درک مکانیسم بیماریهایی مانند پارکینسون، صرع و افسردگی کمک کرده و امکان توسعهٔ بیومارکرهای عصبی برای تشخیص زودهنگام و درمانهای هدفمند مانند تحریک عمیق مغزی (DBS) را فراهم میآورند.
2. 🧠 درک شناخت و رفتار
مدلسازی محاسباتی به دانشمندان اجازه میدهد تا فرآیندهای شناختی سطح بالا مانند حافظه کاری، تصمیمگیری و انعطافپذیری رفتاری را شبیهسازی کرده و نقش نواحی مختلف مغز را در این فرآیندها کشف کنند.
3. 🤖 الهام از مغز برای ساخت هوش مصنوعی (AI)
مفاهیم و معماریهای الهامگرفته از مغز، مانند شبکههای عصبی اسپایکینگ (SNN) ، به عنوان پایهای برای نسل جدیدی از سیستمهای هوش مصنوعی به نام محاسبات نورومورفیک (Neuromorphic Computing) قرار گرفتهاند.
4. ⚙️ کاربردهای عملی در مهندسی کنترل
🚗 کنترل خودرو با الهام از مغز
در یک مطالعه در سال ۲۰۲۵، محققان با الهام از سیستم عاطفی مغز، یک کنترلکننده هوشمند مبتنی بر یادگیری عاطفی (BELBIC) برای سیستمهای چندورودی-چندخروجی (MIMO) طراحی کردند که عملکرد قابل توجهی در کنترل سیستمهای پیچیده داشت.
🧪 سختافزارهای نورومورفیک برای کنترل لحظهای
در پژوهشی دیگر در سال ۲۰۲۵، از تراشههای نورومورفیک برای کنترل یک سیستم تعادلساز (Cartpole) استفاده شد. این تراشهها با مصرف توان بسیار پایین، توانایی انجام محاسبات پیچیده را در زمان واقعی دارند و برای کاربردهای کنترل در لبه (Edge Control) بسیار مناسب هستند. همچنین در همین سال، سیستمی به نام NODES برای کنترل لحظهای موتورهای احتراقی با استفاده از شبکههای عصبی اسپایکینگ در حال تکامل، توسعه و با موفقیت روی یک موتور واقعی پیادهسازی شد.
🧭 کنترل روی منیفلد عصبی
یک چارچوب جدید در سال ۲۰۲۵، از تئوری کنترل بهینه برای کنترل دینامیک روی «منیفلد عصبی» استفاده کرده است. منیفلد عصبی، فضایی با ابعاد پایینتر است که فعالیت جمعیتهای بزرگ عصبی را به شکل سادهتری نمایش میدهد. کنترل این دینامیک، روشی قدرتمند برای هدایت فعالیت مغز به سمت حالتهای مطلوب فراهم میکند.
🧩 مدلهای محاسباتی معروف در علوم اعصاب
مدلهای ریاضی متعددی برای شبیهسازی رفتار نورونها و شبکههای عصبی توسعه یافتهاند که هر کدام سطوح مختلفی از جزئیات بیولوژیکی را ارائه میدهند:
-
🔬 مدل های جزئینگر (Biophysically Detailed): مانند مدل هاچکین-هاکسلی که رفتار کانالهای یونی را با دقت بالا شبیهسازی میکند.
- ⚡ مدلهای کاهشیافته (Reduced): مانند مدلهای
Izhikevich،FitzHugh-NagumoوMorris-Lecarکه با سادهسازی، رفتار کیفی نورون را با هزینه محاسباتی کمتر بازتولید میکنند. -
⏱️ مدلهای جمعیت عصبی (Neural Mass Models): رفتار جمعیتهای بزرگ نورونی را به جای نورونهای منفرد، مدلسازی میکنند و برای شبیهسازی نواحی مختلف مغز کاربرد دارند.
-
🔗 مدلهای شبکهای (Network Models): مجموعهای از گرهها (نورونها یا جمعیتها) را با توابع ارتباطی مختلف (خطی، غیرخطی، با تأخیر) به هم متصل میکنند.
⚠️ چالشها و محدودیتها
-
🧩 پیچیدگی محض: مغز انسان با میلیاردها نورون و تریلیونها اتصال (سیناپس)، پیچیدهترین سیستم شناختهشده است. مدلسازی کل مغز در مقیاس سلولی با توان محاسباتی فعلی تقریباً غیرممکن است.
-
📡 محدودیت در جمعآوری داده: تکنیکهای فعلی تصویربرداری عصبی (مانند fMRI یا EEG) یا دارای دقت زمانی پایین هستند یا دقت مکانی کافی را ندارند. ثبت فعالیت هزاران نورون به طور همزمان و با جزئیات بالا، هنوز یک چالش بزرگ است.
-
📊 شکاف بین سطوح: یک چالش اساسی، یکپارچهسازی اطلاعات در مقیاسهای مختلف است. چگونه میتوان از دینامیک کانالهای یونی در یک نورون به رفتار کل مغز رسید؟
-
🧮 هزینه محاسباتی: شبیهسازی مدلهای بزرگ و پیچیده عصبی به منابع محاسباتی عظیم و زمان طولانی نیاز دارد.
-
🧪 اعتبارسنجی مدل: یک مدل کامپیوتری تنها یک فرضیه است. اثبات اینکه این مدل واقعاً نحوهٔ کار مغز را به درستی توصیف میکند، نیازمند آزمایشهای تجربی دقیق و چالشبرانگیز است.
🚀 آینده و راهکارهای نوین
با وجود چالشها، افقهای پیش رو بسیار روشن است:
-
🤖 همافزایی با یادگیری ماشین و هوش مصنوعی: یادگیری ماشین، به ویژه یادگیری عمیق، در حال متحول کردن این حوزه است. از این روشها برای تحلیل دادههای عظیم عصبی، کشف الگوهای پنهان و حتی طراحی مدلهای جدید استفاده میشود.
-
⚡ محاسبات نورومورفیک: ساخت تراشههایی که مستقیماً از معماری مغز الهام گرفتهاند (مانند
Loihiاینتل)، راه را برای سیستمهای کنترل هوشمند با توان مصرفی بسیار پایین هموار میکند. -
🔄 کنترل حلقهبسته و شخصیسازی درمان: پیشرفت در سختافزار و الگوریتمها، امکان ساخت سیستمهای تحریک مغزی حلقهبسته را فراهم میکند که به صورت لحظهای فعالیت مغز را پایش کرده و تحریک را برای هر بیمار به طور شخصیسازیشده تنظیم میکند.
-
🔗 مدلسازی یکپارچه و چندمقیاسی: با افزایش قدرت پردازش و توسعه الگوریتمهای جدید، گامهای بلندی در جهت ساخت مدلهای یکپارچه برداشته میشود که سطوح مختلف را از ژن تا رفتار به هم متصل میکنند.
💡 جمعبندی
علوم اعصاب محاسباتی، به عنوان یکی از پیشروترین حوزههای بینرشتهای قرن ۲۱، نه تنها به ما در درک بنیادین زیستیمان کمک میکند، بلکه ابزارها و الهامبخش بینظیری برای مهندسی کنترل و هوش مصنوعی فراهم میآورد. از مدلهای ریاضی نورونها تا کنترل لحظهای موتورها با تراشههای نورومورفیک، این حوزه نشان داده است که آیندهٔ فناوری، در گرو درک عمیقتر از هوش طبیعی و به کارگیری اصول آن در سیستمهای مصنوعی است. همافزایی میان مهندسی کنترل و علوم اعصاب، نه تنها چالشهای کنونی را مرتفع خواهد ساخت، بلکه افقهای جدیدی را در درمان بیماریها، ساخت رباتهای پیشرفته و خلق هوشهای مصنوعی کارآمدتر خواهد گشود.
📚 مراجع معتبر علمی (۲۰۲۵–۲۰۲۶)
-
Wang, X.J. (2025). Theoretical Neuroscience: Understanding Cognition. CRC Press.
-
Fradkov, A. (2024). Definition of Cybernetical Neuroscience. arXiv preprint.
-
Banerjee, S., et al. (2025). Benchmarking spiking neurons for linear quadratic regulator control. Neuromorphic Computing and Engineering, 5, 044006.
-
Patel, K., et al. (2025). Evolution at the Edge: Real-Time Evolution for Neuromorphic Engine Control. In NICE 2025 Proceedings. IEEE.
-
Liu, Q., et al. (2024). Modelling and Controlling System Dynamics of the Brain. Advances in Neurobiology.
-
Loosen, A.M., et al. (2025). Revisiting the role of computational neuroimaging. Neuropsychopharmacology, 50, 103–113.
-
Priya, V. (2025). Challenges and Opportunities in Computational Neurology. In Computational Neurology. CRC Press.
📖 واژهنامه تخصصی (انگلیسی–فارسی)